

交流变频驱动海洋绞车多电机同步控制技术研究
-
- 10 9 月, 2025
李成 (湖南机电职业技术学院,湖南长沙 410000)
摘要:在二十大中明确“既要追求高质量发展的同时,也要注重安全保障,促进经济发展保障关键产品、重大工程、重要物质及战略性先进技术领域的自给率”。为获得和使用海洋深处或极端环境的海洋资源,必须使用专用海洋工程装备来完成该功能。较高级的海洋资源调查、开采设备是开发海洋资源的前提与保障。因此本文对交流变频驱动海洋绞车的多电机同步控制技术进行深入研究,旨在提升我国海洋设备的研究水平与创新能力。
关键词:交流变频驱动;海洋绞车;多电机;同步控制
引言:
海洋绞车广泛应用于各类船上,包括海上科考船、海底资源调查船、海上运维船以及海底铺管船等等。其作用包括但不限于:水下拖曳系统(UnderwaterTowedSystems,UTs)、水下机器人(RemoteOperatedVehicle,ROVs)、海底深水硬件组装(DeepwaterInstallationofSubseaHardware,DISH)、海洋钻井、海洋管道铺设、深海油气开采等海疆资源开采以及深海作业的环境中。海洋绞车必须经常在动荡的深海环境中工作,将会受到汹涌的波浪影响,同时导致母船发生上下摆动,其最大幅值可高达 5~10m。一些海底作业装备需要保持一个固定的位置,但是母船由于风浪的影响发生上下位移而会干扰正常的潜底工作,还会导致缆绳发生突然的脱开以及断裂,对于其连接器尤其严重。因此,海洋绞车需要有自动张力调整与升降补偿功能。当拖船与被拖物之间的张力受风浪等外界影响而发生改变,卷筒自动调控缆绳将张力保持在一个范围内,避免不平衡的张力损伤拖缆,影响海下作业。
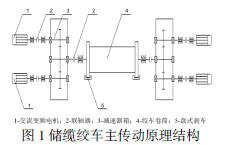
一、储缆绞车多电机传动系统
使用四台电动机同时驱动一个载荷进行储缆绞车运动(如图 1 所示)。理论上,可以使四台电动机经过刚性连接带动储缆绞车,从而保证驱动力的平衡,降低零部件的损耗,同时提高整套传动机构的机械强度,并且降低电机额外的能量损耗,提高电机的效率,以及设备整体的布置弹性,此外电动机体积小且安装方便,便于现场调整维护工作。针对储缆绞车多电机驱动系统中各电机相互耦合、相互协同的情况,本文将通过矢量控制法建立异步电机解耦模型并实现电机传动协调控制。
二、交流异步电机空间矢量坐标变换
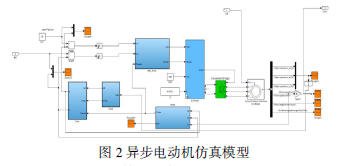
矢量变换是三相交流绕组到两相静止绕组再到旋转坐标下的两相直流绕组间的等价变换,它能有效地降低和简化复杂的高阶性和强相互作用的异步电动机的复杂程度。其工作原理是异步电动机三相静止坐标下的定子交流电流按照Clarke 变换映射为两相静止坐标下的交流电流,再经过旋转变换变为两相旋转坐标下的直流电流,从而异步电动机具有直流电动机的动态和静态特性。交流电机中,将三对相互对称的电流输入到三对相互对称的线圈,便可在其空气隙中产生一对旋转磁场。在等效功率前提下,按照电流等效前后的等效旋转磁场原则,按照同步电动机向量变换过程,本文设计出本节提出四驱交流同步电动机的模拟模型如图 2 所示。
三、电机组协同控制策略研究
非耦合控制方式原理简单,其协调能力较差,但控制精度要求较高的控制系统中,耦合控制方式能有效提高其控制协同能力;然而,耦合控制方式只适用于采用两台电机时,在有限范围进行了控制方案的比较,效果较为单一,而偏差耦合控制方式中每个电机都与该电机控制器构成了各自的闭环控制子系统,不仅提高了其运动响应性和抗干扰能力,而且适用于多台电机驱动控制系统,在上面基础上选用交叉耦合控制方式实现绞车多电机驱动系统的协同控制。
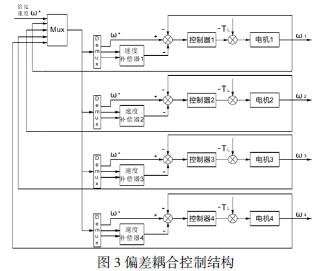
交错连接的方法实现各电机速度的调节,并将其与其他电机速度偏差之差之和作为速度调节器的输入。本文使用的偏差耦合控制结构如图 3 所示,是文章所设计的储缆绞车四电机联合驱动同步控制系统。最终实现四电机系统的协同运动。它与交叉连接的区别在于,偏离连接更适用于本文中的四电机驱动控制系统。
四、储缆绞车电机组协同控制系统建模仿真
基于上述对各台交流异步电机驱动装置的传动性能推导 , 采 用 上 述 所 述 的 偏 差 协 同 控 制 结 构 , 利 用Matlab/Simulink 搭建了其动态模型进行仿真试验,以表明上述所提出的协同控制策略的性能与有效性。将异步电机建模包装之后,调用各种组件库元件在 Matlab/Simulink 中构建四台交流异步电机的协同运动模拟测试模型,各模型之间通过线性连接方式联系起来。
本系统采用了以偏差联动控制原理为基础的设计方案,针对四台电机的误差修正模块进行了模块化封装处理。具体来说,电机一号的误差修正模块模型披露,其余三台电机的误差修正模块与电机一号的结构一致,因此不再另行展示。
五、仿真结果分析
在进行模型动态模拟的过程中,将总时长设定为二十秒。涉及的四台电机具备一致的参数配置。依据前述章节对电缆卷筒电机的选择标准,在理论最优条件下,若四台电机协同作业,则应选用功率输出为 75 千瓦,扭矩输出为 377牛·米的变频交流电动机。具体的电机参数已在表 1 中详细列出。

针对绞车多电机系统在现实工作中的表现,本次实验采用模拟手段,对电机在无负载启动以及承受不同负载扰动下的启动过程进行了研究。通过对比分析所获取的数据,探究了电机启动性能及电机之间同步运作的情况,旨在证明所制定的多电机协同控制策略能够有效提升绞车多电机驱动系统的协同工作效率,减少电机同步运作中的误差,从而增强系统的作业效率。
1.电机空载运行
在实验条件下,所测试电机的基准转速设定为 1000 转每分钟,初始时每个电机的输出转矩均为 0 牛·米。在无负载条件下进行仿真模拟,结果显示四个电机的转速波动情况。观察该图,我们可以看到这些电机的响应速度迅速,在2.2 秒时转速便稳定下来,逐渐接近于最初的设定转速。进一步分析电机间的转速偏差,结果显示四个电机间的同步误差值为零,这表明它们的转速变化保持了高度的一致性。
当电动机在无负载状态下运转至第 5 秒时,突然对其中的电机 1 施加 50Nm 的负载扭矩,电机转速的变动轨迹可以推断,电机转速的波动与无负载运行时情形大致保持一致,然而在遭遇 50Nm 负载扭矩的瞬间冲击后,电机 1 的转速有所降低,并且其他电机的转速也相应地产生了下降,各电机下降幅度呈现同步性,经过一段时间的调整后,四台电机的转速均趋于稳定,在 996r/min 至 998r/min 范围内。
2.电机不同负载启动
为模拟真实工作环境,对四台电机分别施加了 10Nm、 20Nm、30Nm 和 40Nm 的负载转矩。当这些电机在各自不同负载下启动时,其整体转速的变动情况并不完全同步,但自1.6 秒起,转速一致性逐渐增强,并最终稳定在 994 至 996转每分钟之间。
因此,经过对储缆绞车四电机联合控制系统在两种不同情景下的模拟实验分析,结果显示各电机展现出迅速的响应速度和优良的启动同步性。面对突发负荷增加,电机的转速有所下降,且其他电机的转速降幅呈现同步性,这表明偏差耦合控制方法对电机运动状态实现了有效同步,确保了储缆绞车四个驱动电机的协作性能得到显著提升。
结束语:
本文确定了深海万米绞车储缆绞车的主导传动方式,主要是由四台交流变频电机提供动力输出带动储缆绞车卷筒转动,但由于多电机驱动系统中每个电机彼此牵连和协调不强,因此本文针对此问题对绞车多电机驱动系统进行研究并探究了几种不同控制策略(非耦合以及耦合)的优点和缺点,最终选择了偏差耦合的控制策略,并设计了绞车多电机控制系统的误差补偿装置;然后阐述了通过 Matlab/Simulink 仿真模拟软件建立的绞车四电机驱动系统同步协调控制模型,并以偏差耦合控制策略为例进行研究,研究过程中的实际结果也能够看到在受到外部影响时的四台电机和不同电机的速度,从而论证了偏差耦合控制策略的可接受性,这同时也说明了偏差耦合控制策略提高了绞车多电机驱动系统之间协调的工作性能,从而整体上增加了工作效率。
参考文献:
【1】程立,寇蓓,焦思菡,陈继甲.新型高效 12000m 海洋自升式平台用绞车设计[J].机械研究与应用,2021,34(04):55-56. 【2】谢威,吴坤阳,刘全良.海洋科考储缆绞车设计及分析[J].机械工程师,2021,(08):36-37+40.
【3】严颖,张小平,姜海鹏,张铸,赵延明,黄良沛.基于 GSSEC的开关磁阻电机驱动的海洋绞车主动升沉补偿控制方法[J].工程设计学报,2021,28(02):132-140.
【4】王钊.交流变频控制系统在海洋石油修井机的应用[J].当代化工研究,2019,(04):50-52.
本文系 2024 年度湖南机电职业技术学院校级一般课题,交流变频驱动海洋绞车多电机同步控制技术研究(编号:YJB202404)。