

瓜果搬运机器人自主导航技术研究与应用
-
- 17 9 月, 2025
张守兴 李昂
(海口经济学院,海南海口 571127)
摘要:为有效提升瓜果搬运效率、精度,本次研究中对瓜果搬运机器人自主导航技术进行研究,将自主导航技术应用到瓜果搬运机器人中,能够提升瓜果生产效率、降低劳动成本、提高搬运精度。瓜果搬运机器人自主导航技术主要包括基于多传感器一致性表述的多层次地图构建技术、基于多元感知数据的自主场景理解技术、搬运机器人基于学习的长期自主导航技术。本次研究中在校园场景、种植场景应用瓜果搬运机器人自主导航技术,以此进一步验证瓜果搬运机器人应用自主导航技术的可行性。
关键词:瓜果搬运机器人;自主导航技术;精度
引言:
智能化、自动化技术在农业生产中的应用,为农业生产效率的提升创造条件。搬运作为农业瓜果生产过程中的重要环节,其效果与瓜果生产效率存在直接关系,传统的人工搬运瓜果的方式效率低下,难以满足瓜果高效生产的需求。瓜果搬运机器人配合自主导航技术,实现高效、精准搬运,不仅大幅提升瓜果搬运的效率、降低人力成本,还推动农业瓜果生产向智能化、现代化的方向发展,对于提升瓜果生产效率具有重要意义。
一、瓜果搬运机器人自主导航的作用
1.提升生产效率
传统瓜果搬运方式以人工为主,不仅效率低下,还具有较大的劳动强度。瓜果搬运机器人在自主导航技术的支持下,能够按照预设或实时规划路径在复杂环境中进行搬运作业,使搬运时间大幅缩短。例如人工搬运瓜果效率为100kg/h,而一台搬运机器人在自主导航技术支持下瓜果搬运效率为 500kg/h,使整体效率提升 4 倍。大规模果园使用搬运机器人可实现连续工作,在自主导航技术的支持下能够快速将采摘瓜果搬运到指定地点,使瓜果搬运效率得到有效提升。
2.降低劳动成本
人工搬运瓜果不仅效率低下、劳动强度大,还会产生较高的劳动成本,使用瓜果搬运机器人不仅能实现高效搬运,还能降低劳动成本。瓜果搬运机器人可连续工作,减少对大量人工的依赖性。采用瓜果搬运机器人后,果园人力成本得到有效降低,在减轻果园经营者经济负担的同时,还在一定程度上缓解现阶段农业劳动力短缺的问题。瓜果采摘高峰期人工成本会大幅上升,而瓜果搬运机器人工作性能稳定,能够有效保证瓜果生产顺利进行,避免因劳动成本上升造成人力不足从而导致瓜果生产损失。
3.提高搬运精度
瓜果搬运机器人在自主导航技术的支持下实现精准定位、搬运,大幅度降低因人工失误造成瓜果损坏风险。自主导航技术支持机器人精准路径规划、障碍物识别,使机器人在复杂环境中能够安全、稳定运行,有效保障瓜果搬运过程中的质量、完整性。果园中使用瓜果搬运机器人在自主导航技术的支持下,可精确避开树木、沟渠等障碍物,同时准确抓取、放置瓜果,避免瓜果在搬运过程中的发生碰撞、挤压,使瓜果的品质得到保障。
二、瓜果搬运机器人自主导航技术研究
1.基于多传感器一致性表述的多层次地图构建技术
室外场景中搬运机器人感知数据具有多样性,为实现数据一致性表征,框架设计建立在多传感器联合标定、数据关联的基础上。采用拓扑地图模型开展全局环境表述,将拓扑节点场景拓展为多层次地图。采用点云加空间八叉树栅格模型作为数据层,尽管占用存储空间 5GB,但是能够丰富数据,为避障、路径规划提供支持,1000m2瓜果搬运场景中,机器人避障成功率达到 95%。
基于多元融合数据特征提取的几何表述模型构建特征层,用于位姿估计、目标识别,不同光照条件下进行的 100次实验中,瓜果搬运机器人位姿估计误差均值为 0.2m;采用语义地图表述模型形成语义层,对 200 个场景语义分割准确率为 90%。在实际应用中多层次地图构建技术能够根据不同任务需求,对不同层次的地图信息进行快速切换、关联,以此为瓜果搬运机器人自主导航提供支持。
2.基于多元感知数据的自主场景理解技术
传感器性能差异导致点云分布不平衡,使用投影变换算法将三维点云转化为图像。采用全卷积神经网络和基于卷积神经网络全连接条件随机场两种深度学习模型开展室外景物识别,全卷积神经网络融合多反卷积层与中间卷积层结果,采用 SoftMax 层分类对 500 张图像测试中对瓜果类物体识别准确率达到 85%。基于卷积神经网络全连接条件随机场模型挖掘深层特征,考虑像素语义关系,相同测试条件下对复杂背景下瓜果类物体识别准确率超过全卷积神经网络。两种模型互补能够使搬运机器人更加精准地识别不同场景下的瓜果、障碍物,为机器人自主决策提供可靠依据。
3.搬运机器人基于学习的长期自主导航技术
(1)长期鲁棒重定位
长期鲁棒重定位可进一步分为拓扑节点层面全局定位、子地图内的局部精确定位。弱 GPS 环境下全局定位依赖场景识别,利用拓扑结构实现鲁棒全局重定位。局部精确定位利用三维激光扫描并借助背景信息实现场景配准,100 次实验中利用 NDT 技术求解位姿误差均值为 0.15m,并利用语义分割结果对配准精度进行优化。当瓜果搬运机器人长期运行条件的过程中,存在环境变化、信号干扰等问题,在长期鲁棒重定位技术的支持下,使瓜果搬运机器人能够快速、准确确定自身位置,以此保证搬运导航的准确性。
(2)基于强化学习的智能运动规划
在端-端方式学习导航的支持下,输入连续 10 帧 RGB图像,由机器人第一视角 RGB 图像表示目标位置。对于稀疏奖励问题提出基于内在激励的奖励函数学习法,在 200次实验中机器人探索未知区域比例显著提高,避免机器人徘徊在已经过的区域。基于强化学习的智能运动规划使机器人能够根据不同环境、任务需求,自主规划最佳路径,使瓜果搬运机器人的适应性、灵活性得到提升。
三、瓜果搬运机器人自主导航技术应用
1.校园场景应用
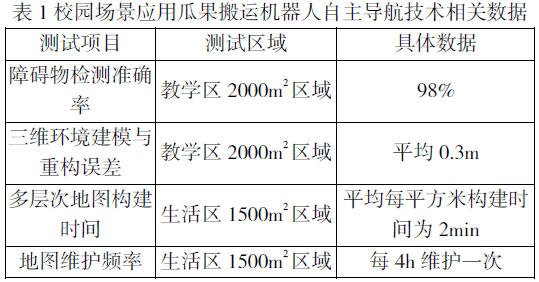
在海口经济学院校园的教学区、生活区等场景使用自主研发的配备三维激光雷达、可见光视觉、红外视觉、IMU 等多种传感器,并搭载车载计算机的搬运机器人进行实验验证。将多元异构感知数据融合、三维环境建模与重构、大范围复杂三维场景多层次地图构建与维护算法的有效性与鲁棒性作为验证重点。表 1 所示为校园场景应用瓜果搬运机器人自主导航技术相关数据。通过对表 1 数据进行分析发现,校园场景实验中搬运机器人在教学区、生活区不同地形和环境下,均能精准检测障碍物,并构建高精度三维环境地图。通过融合多元异构感知数据,机器人能够更全面地了解周围环境,使导航的安全性、可靠性得到提高。构建多层次地图、维护算法能够以环境变化为依据及时更新地图信息,以此保证机器人正常运行。
2.种植园场景应用
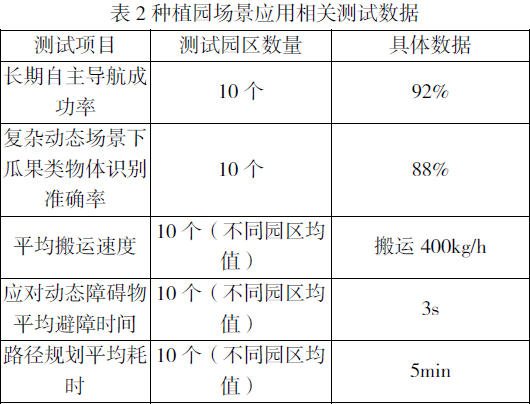
本次研究选取海南省琼海市共计 10 个多样化瓜果种植园区作为测试环境,对搬运机器人长期自主导航、复杂动态场景下自主场景理解算法的有效性、可靠性进行测试。表 2所示为种植园场景应用相关测试数据。通过对表 2 数据进行分析发现,种植园场景应用中,搬运机器人在丘陵地形、平原地形、不同种植密度下等不同果园环境中,均能够实现长期自主导航。机器人能够准确地识别出复杂动态场景下的瓜果类物体,当存在枝叶遮挡的情况下,机器人能够保持较高的识别准确率。当搬运过程中遇到动态障碍物时,机器人能够迅速做出反应并避障,平均避障时间为 3s,有效降低碰撞事故发生风险。路径规划平均耗时较短,能够在短时间内快速、准确地规划最佳路径,使搬运效率得到有效提升。
结束语:
为瓜果搬运机器人应用自主导航技术,在现代农业生产中展现突出优势,具体表现为能够提升生产效率、降低成本、保障瓜果搬运精准度。为进一步发挥瓜果搬运机器自主导航技术的作用,在未来的研究中应当持续创新并完善技术、拓展应用场景,以此为农业生产创造更大的价值。
参考文献:
【1】孙慧霞, 毛世彤, 柳长叶, 乔文宇, 王沁欣, 马紫微. 基于视觉系统的自主导航搬运机器人的设计[J]. 运城学院学报, 2023, 41 (06): 35-41.
【2】丁腾腾. 室内搬运机器人系统设计与实现[D]. 南京信息工程大学, 2023.
【3】王飞涛. 基于激光 SLAM 搬运机器人自主导航研究与实现[D]. 安徽农业大学, 2020.
【4】刘驰. 自主导航搬运机器人控制系统的设计[D]. 中北大学, 2016.
本文系海南省高等学校科学研究项目:海南热带瓜果搬运机器人自主导航方法研究(编号:Hnky2024ZD-19)的研究成果。